Camera Calibration
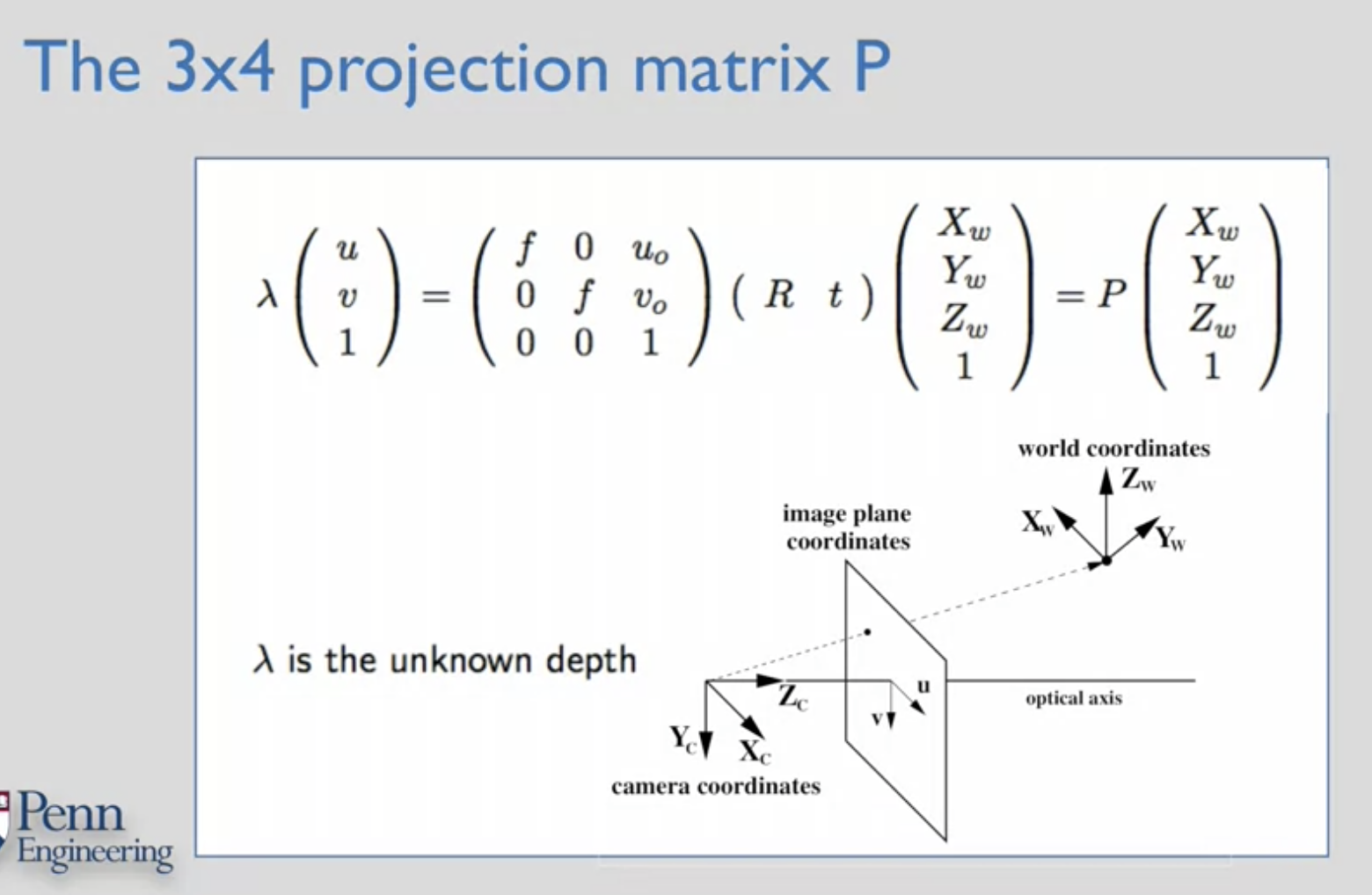
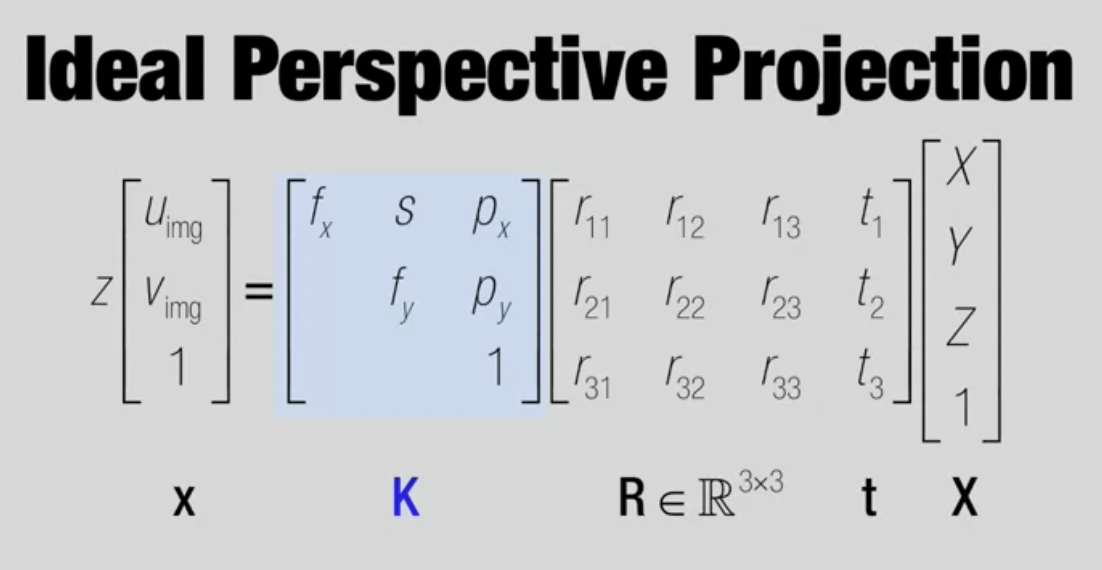
projection matrix
- 3x4로 된 행렬 P
- 여기에 world coordinates (X, Y, Z, 1) 를 곱하면 λ * (u, v, 1) 을 얻는다
- u, v : 픽셀 위치
- λ : unknown depth
- central projeciton 과 픽셀을 활용하여 "range space" 구하기
--> Projection matrix P 를 먼저 알아야 함
V를 W로 변환해주는 행렬 A가 있다하자.
A행렬의 Range space는 y가 W에 속할때 V에 속한 모든 x에 대해 Ax = y가 되는 공간을 말한다
행렬 P는 카메라 파라미터(f, u0, v0)와 세상에 대한 파라미터(extrinsic parameters: R, t)에 따라 다름
[calibration]
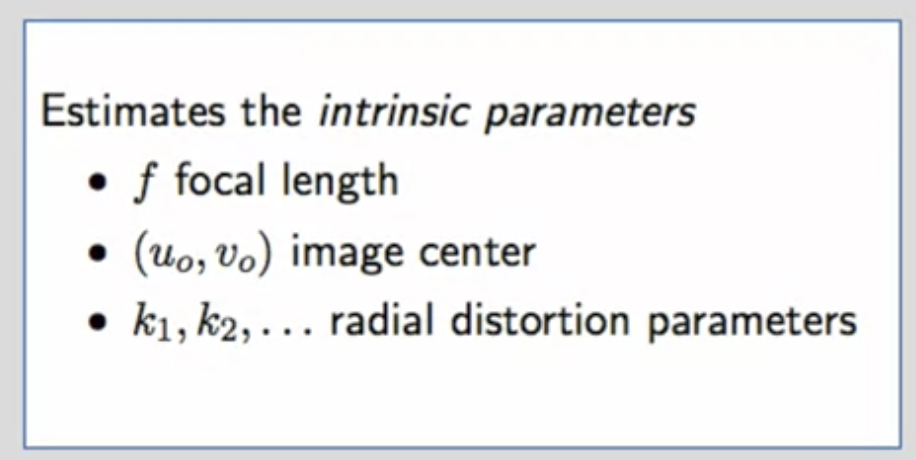
calibration은 camera의 intrinsic parameter 들을 추정한다
이 intrinsic parameter들은 extrinsic parameter들과 상반된다; 후자는 고정된 프레임에 대한 카메라의 위치에 달렸음
- world 의 특정 지점들에 대한 world cooridnates와 그에 상응하는 image coordinates가 주어졌을 때의 intrinsic/extrinsic parameter들을 계산해보자
- Rotation(R), Translatioin(T), intrinsic K를 구하고 radial distortion (어안렌즈에서 왜곡되는 것)을 제거하고 나면, world의 projection of the rays를 찾을 수 있음
'인공지능 > pose estimation' 카테고리의 다른 글
| Impersonator++ 이해하기 (0) | 2022.08.10 |
|---|---|
| Vanishing Points; How to Compute Camera Orientation (0) | 2022.05.11 |
| How to Compute Intrinsics from Vanishing Points (0) | 2022.05.11 |
| 3D World to First Person Transformation (0) | 2022.05.10 |
| Pinhole Camera Model/Focal Length and Dolly Zoom Effect/Intrinsic Camera Parameter (0) | 2022.05.10 |